فصل پنجم کتاب: بهینه کنترل فعال سازه با رویکرد کلاسیک و هوش مصنوعی
۱-۵- مقدمه
در مهندسی عمران به طور کلی روشهای مختلفی برای طراحی ساختمانها با کارآئی مناسب در برابر زلزله، آزمایش و مورد مطالعه قرار گرفته است. در روشهای مرسوم، ساختمان با استفاده از ترکیب سختی، قابلیت شکلپذیری، استهلاک انرژی و همچنین اینرسی در برابر نیروهای دینامیکی (نظیر باد، زلزله، ارتعاش ماشینآلات، امواج دریا و …) از خود مقاومت نشان میدهند. مقدار میرایی در این قبیل سازهها بسیار کم بوده از این رو انرژی مستهلک شده در محدوده رفتار الاستیک سازه ناچیز میباشد. در هنگام اعمال نیروهای دینامیکی قوی نظیر زلزله، این ساختمانها بعد از محدودهی الاستیک، تغییر مکانهای زیادی مییابند و فقط به واسطه چگونگی قابلیت تغییر مکان غیرالاستیک خود، پایدار باقی میمانند. این تغییر مکانهای غیرالاستیک موجب به وجود آمدن مفاصل پلاستیک به صورت موضعی در نقاطی از سازه میگردند که خود موجب افزایش شکلپذیری و همچنین افزایش استهلاک انرژی میگردد. در نتیجه مقدار زیادی از انرژی زلزله به واسطهی تخریبهای موضعی در سیستم مقاوم جانبی سازه مستهلک میگردد.
۱-۵- مقدمه
در مهندسی عمران به طور کلی روشهای مختلفی برای طراحی ساختمانها با کارآئی مناسب در برابر زلزله، آزمایش و مورد مطالعه قرار گرفته است. در روشهای مرسوم، ساختمان با استفاده از ترکیب سختی، قابلیت شکلپذیری، استهلاک انرژی و همچنین اینرسی در برابر نیروهای دینامیکی (نظیر باد، زلزله، ارتعاش ماشینآلات، امواج دریا و …) از خود مقاومت نشان میدهند. مقدار میرایی در این قبیل سازهها بسیار کم بوده از این رو انرژی مستهلک شده در محدوده رفتار الاستیک سازه ناچیز میباشد. در هنگام اعمال نیروهای دینامیکی قوی نظیر زلزله، این ساختمانها بعد از محدودهی الاستیک، تغییر مکانهای زیادی مییابند و فقط به واسطه چگونگی قابلیت تغییر مکان غیرالاستیک خود، پایدار باقی میمانند. این تغییر مکانهای غیرالاستیک موجب به وجود آمدن مفاصل پلاستیک به صورت موضعی در نقاطی از سازه میگردند که خود موجب افزایش شکلپذیری و همچنین افزایش استهلاک انرژی میگردد. در نتیجه مقدار زیادی از انرژی زلزله به واسطهی تخریبهای موضعی در سیستم مقاوم جانبی سازه مستهلک میگردد.
در سیستمهای مدرن سازهای، سیستمهای کنترلی جایگاه ویژهای را به خود اختصاص دادهاند. به همین دلیل از سیستمهای مختلف الحاقی در ساختمان استفاده میشود. در دهههای اخیر کاهش پاسخ سازهای که به واسطه نیروهای دینامیکی بوجود آمده موضوع عنوان بسیاری از مقالات شده است و تعداد زیادی از مفاهیم کنترل به این منظور در سازه مورد توجه قرار گرفته است [Datta, 1996].
در زیر برخی از فواید اصلی سیستمهای کنترل در سازه آورده شده است:
- کاهش مناسب ارتعاش طبقات ساختمانهای انعطافپذیر تحت اثر بارهای طبیعی غیر منتظره بزرگ.
- مقاوم ساختن سازهها در مقابل پتانسیل خطرات طبیعی.
- حفاظت از اعضاء حساس و مهم و سیستمهای ثانویه (اعضاء غیر سازهای).
- در نهایت تهیه مفاهیم و روشهای جدید برای طراحی اقتصادی سازهها در برابر بارهای طبیعی.
به طور کلی سیستمهای سازهای را میتوان به چهار دسته عمده زیر تقسیم کرد [Spencer, 1999]:
- کنترل غیر فعال
- کنترل فعال
- کنترل نیمه فعال
- کنترل مرکب
کنترل غیر فعال در سازهها بدون اعمال نیرو خارجی یاانرژی جهت کاهش ارتعاش سازه استفاده میشود. از جهت دیگر در کنترل فعال جهت کاهش ارتعاش سازه علاوه بر استفاده از یکی از روشهای کنترل غیر فعال از یک نیروی خارجی نیز استفاده میشود. در کنترل نیمه فعال برای بهتر شدن عملکرد کنترلگر، در هر لحظه پارامترهای کنترلگر با توجه به میزان نیروی وارده تغییر میکند. اما در کنترلها مرکب چند سیستم کنترل غیرفعال با فعال یا نیمه فعال به منظور هر چه بهتر شدن سیستم باهم ترکیب میشوند. به طور کل در طراحی کنترل گرها چند چیز بسیار مهم است:
- مدل کردن صحیح پاسخ سازه
- بکارگیری یک سیستم کنترلگر مناسب
- انتخاب و تنظیم پارامترهای کنترلگر جهت طراحی کنترلگر
در این فصل توضیحات مختصری در طراحی و نوع عملکرد سیستمهای کنترلگر ارائه میشود؛
۵-۲- کنترل غیر فعال (Structural Passive Control)
اساساً کنترل غیرفعال را میتوان به دو گروه اصلی تقسیم کرد. در گروه اول کنترل انرژی ارتعاشی اعمال شده به سازه توسط طرح یک سیستم الحاقی و همچنین طراحی بهینه مکان آن سیستم جهت کاهش ارتعاشی صورت میگیرد. اما در گروه دوم هماهنگی مضر فرکانس ارتعاش خارجی با سازه با دست کاری در فرکانس سازه فیلتر میشود. این گروه در سازههای مهم و همچنین سازههایی که نیاز به ایزوله گرهای پایهای دارند مورد استفاده قرار میگیرد [Datta, 1996].
۵-۲-۱- سیستمهای جاذب انرژی
در سیستم کنترل غیرفعال گروه اول اصل بر افزدون جاذبهای انرژی به ساختمان پایهریزی شده است. بدین صورت که این وسایل قسمتی از انرژی ورودی زلزله را به تنهایی جذب و مستهلک مینماید. برای روشن شدن این موضوع، رابطه انرژی ورودی سیستم با سایر قسمتها به صورت زیر نمایش داده میشود [Constantinou, et al. 1993].
E=Ek+Es+En+Ed
(۱-۵)
در این رابطه، E قدرمطلق انرژی ورودی به واسطه زلزله، Ek قدر مطلق انرژی جنبشی، Es انرژی کرنشی قابل بازگشت در محدوده الاستیک، En مقدار غیر قابل بازگشت انرژی به واسطه تغییر شکل غیر الاستیک و نهایتاً Ed مقدار انرژی مستهلک شده توسط سیستم الحاقی میباشد. مقدار انرژی ورودی نمایانگر کار انجام شده توسط کل نیروی برشی پایه در فونداسیون، تحت حرکت زمین و همچنین شامل اثر نیروهای اینرسی سازه میباشد.
در روشهای مرسوم طراحی، برای اتلاف بهینه انرژی، از رفتار غیر الاستیک سازه استفاده میگردد. بدین صورت که به سازه اجازه داده میشود از محدوده الاستیک خود خارج شده و به واسطه تغییر شکل به وجود آمده مقداری از انرژی آن مستهلک گردد. که این امر به معنی افزایش مقدار En در رابطه (۵-۱) است و اثر غیر مستقیمی بر افزایش شکلپذیری سازه دارد. در عمل افزایش شکلپذیری، خود مانند فیلتری عمل مینماید که مقداری انرژی زلزله را منعکس میکند و مانع از ورود انرژی به سیستم میگردد.
از این رو به منظور افزایش هر یک از جملات طرف راست رابطه (۵-۱) روشی به منظور کنترل غیر فعال طراحی میگردد.
به طور کلی گروه ایزوله گرهای انرژی به چند دسته مهم زیر تقسیم میشوند:
الف) سیستمهای اصطکاکی
ب) سیستمهای ویسکوالاستیک
پ) سیستمهای جاری شونده
الف) سیستمهای اصطکاکی
میزان انرژی وارده به سازه در حین زلزله به پریود سازه و نسبت آن به پریود غالب حرکت زمین ارتباط مستقیم دارد. همچنین میزان تخریب وارده به سازه نیز بستگی به میزان انرژی هیسترزیس جذب شده تحت فرمهای غیر ارتجاعی اعضای سازهای دارند.
طراحی سازههای معمولی به نحوی که در حین زلزله قوی بدون تخریب باقی بماند غیر اقتصادی میباشد. لذا اکثر آییننامههای مدرن طراحی ساختمان، فلسفه طراحی لرزهای مبتنی را بر مفهوم شکلپذیری ارائه نمودهاند. بر این اساس یک سازه میبایست به نحوی طراحی گردد که شکلپذیری مورد نیاز هر عضو با تغییر شکلپذیری ظرفیتی آن در تعادل باشد تا در حین زلزله، انرژی در عضو به صورت مطمئنی مستهلک گردد. به همین لحاظ استفاده از سیستمهای مستهلک کننده انرژی در ساختمانها سبب ارتجاعی باقی ماندن اعضای سازهای در حین زلزله میگردد و در نتیجه از بروز تخریب جلوگیری مینماید.
در این قسمت به معرفی انواع سیستمهای میراگر اصطکاکی الحاقی از نوع غیر فعال پرداخته میشود.
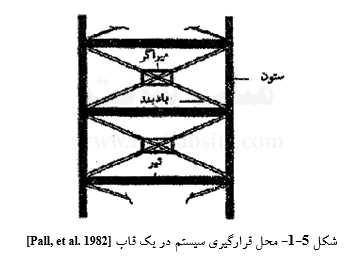
سیستم میراگر اصطکاکی پال: این سیستم میراگر اصطکاکی اولین بار توسط دو کانادایی در سال ۱۹۸۲ ارائه گردید [Pall, et al. 1982]. این سیستم به صورت ساده متشکل از یک مکانیزم با سطوح اصطکاک لغزشی در محل تقاطع بادبندها میباشد. شکل (۵-۱) محل این سیستم را در یک قاب نشان میدهد. جزئیات مربوط به این سیستم و نمونهای از آن در شکل (۵-۲) نشان داده شده است. این سیستم به نحوی طراحی شده که در برابر بارهای سرویس معمولی و زلزلههای متوسط نلغزد، ولیکن طراحی به نحوی است که در حین زلزلههای بزرگ، وسیله مزبور تحت نیرویی از پیش معلوم و پیش از وقوع تغییر شکل ارتجاعی در اعضای اصلی سازهای، شروع به لغزش کند. لغزش فوق سبب استهلاک انرژی زلزله به صورت مکانیکی شده و همچنین پریود طبیعی پایه سازه را نیز تغییر میدهد. سیستم میراگر اصطکاکی را به صورتهای مختلف در سیستمهای بادبند ساختمان بکار میبرند.
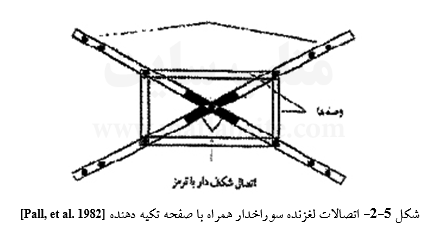
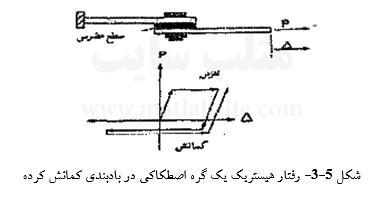
اگر بادبندهای یک سازه دارای قاب معمولی، بنحوی طراحی گردند که در فشار کمانش نکند، گره اصطکاکی را در هر عضو قطری میتوان قرار داد. اما در صورتیکه بادبندیها به صورتی طراحی شوند که تنها در کشش موثر باشند، در این صورت گره اصطکاکی تنها در کشش خواهد لغزید و در طی تغییر نیرو یا کمانش عضو فشاری، لغزشی به عقب نخواهد داشت و در نتیجه، سیستم مستهلک کننده انرژی عملکرد نسبتاً ضعیفی خواهد داشت [Charry, 1993; and Pall, et al. 1982]. رفتار هیستریک یک گره اصطکاکی در حالت کششی تنها در شکل (۵-۳) نشان داده شده است.
سه روش عمده در طراحی و محاسبه میزان انرژی مستهلک شده در سیستم پال وجود دارد، که عبارت است از:
- سیستم قاب بادبندی با میراگر اصطکاکی (FDBF)
- سازه رفتاری شبیه به قاب مقاوم خمشی بادبند دارد (BMRF)
- سازه رفتاری شبیه به یک قاب مقاوم خمشی (MRF)
سیستم میراگر اتصالات اصطکاکی: یکی دیگر از سیستمهای معمول در سازهها برای استهلاک انرژی به روش اصطکاکی، استفاده از اتصالات پیچی لغزشی میباشد. در شکل (۵-۴) یک نوع اتصال اصطکاکی که در آن یک مسیر لغزشی برای پیچها تعبیه شده نشان داده شده است [Frigorian, et al. 1993].
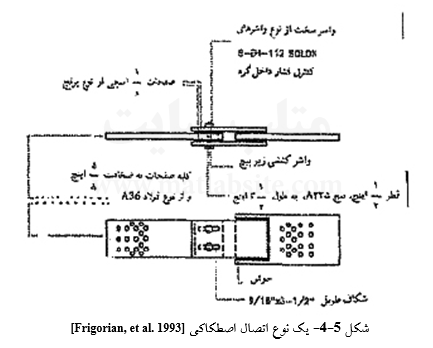
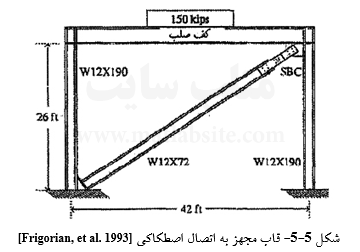
در این سیستم، با لغزش ورقهای اتصال بر روی یکدیگر، انرژی زیادی به وسیله اصطکاک مستهلک میگردد. یکی از این نوع سیستمها SBC است که شکل و طرز قرارگیری آن در قاب در شکل (۵-۵) آمده است.
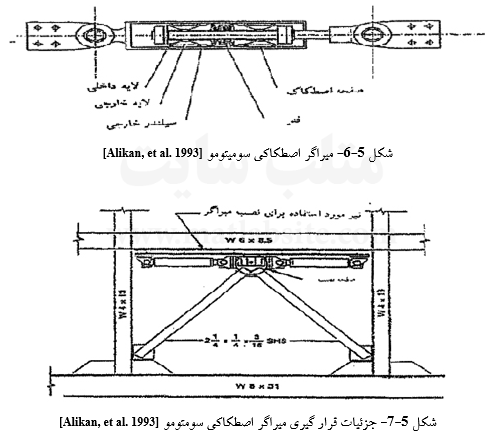
سیستم میراگر اصطکاکی سومیتومو: یک نوع میراگر اصطکاکی توسط صنایع فلزی سومیتومو ساخته و به بازار عرضه شده است که بادبندهای ساختمان به آن متصل میشوند [Aikaen, et al. 1993].
این وسیله دارای یک جداره استوانهای است که در آن بالشتکهایی تعبیه شده که بر روی جداره داخلی وسیله، میلغزند که در اثر این لغزش، انرژی زیادی از طریق اصطکاک مستهلک میگردد (شکل ۵-۶).
در دانشگاه برکلی کالیفرنیا یک مدل سازهای برای انواع این سیستمها ساخته شده است [Alikan, et al. 1993] که در شکل (۵-۷) مدل سازهای مورد استفاده در این آزمایش و جزئیات قرارگیری آن آمده است.
ب) سیستمهای ویسکوالاستیک:
از دیگر انواع سیستمهای کنترلی غیر فعال سیستم ویسکوالاستیک است.
میراگرهای ویسکوالاستیک در سالهای اخیر به صورت موفقیتآمیزی در ساختمانهای بلند به کار گرفته شده است. نتایج حاصل از بررسی و استفاده از این گونه میراگرها، حاکی از کارایی بسیار مناسب آنها میباشد [Soong, et al. 1984]. با استفاده از این وسیله میتوان میزان میرایی سازه را بالا برد ولیکن تا به حال مدل تحلیلی که به توان به طور قابل اطمینانی میزان میرایی معادل را به صورت دقیق پیشبینی نماید در دسترس نمیباشد.
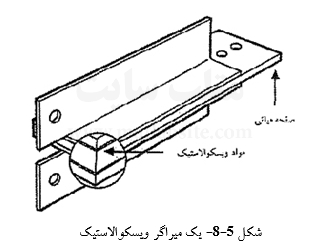
خواص میراگر ویسکوالاستیک: روابط تنش- کرنش برای یک میراگر ویسکو الاستیک (شکل ۵-۸) تحت حرکت تناوبی به صورت زیر قابل بیان میباشد [Chang, et al. 1993]:
![]()
(۲-۵)
![]()
(۳-۵)
که γ۰ و σ۰ دامنه تنش و کرنش میباشند و δ زاویه اختلاف فاز تنش میباشد. باترکیب (۵-۲) و (۵-۳) فرمول به صورت زیر قابل ارائه میباشد:
![]() (۴-۵)
(۴-۵)
که “G’ ,G مدول ذخیره برشی و مدول اتلاف برشی میراگر ویسکوالاستیک میباشند. اگر ‘η=G”/G را ضریب اتلاف انرژی در نظر بگیریم، با توجه به آن یک روش طراحی پیشنهاد شده است که در زیر آمده است.
روش طراحی: الگوریتم زیر جهت طراحی این گونه میراگرها پیشنهاد میشود [ناطق الهی، فریبرز. ۱۳۷۸]:
- تعیین خواص سازهای ساختمان
- تعیین نسبت میرایی مورد نیاز
- انتخاب محل مناسب و قابل دسترسی برای میراگرهای ویسکوالاستیک در ساختمان
- انتخاب سختی میراگر و محاسبه ضریب اتلاف انرژی
- محاسبه نسبت میرایی معادل با استفاده از روش انرژی کرنشی
- تحلیل سازه با استفاده از نسبت میرایی فوق
میراگرهای ویسکوز مایع: این وسیله از یک پیستون سوراخدار که درون سیلندری حاوی مایعی با غلظت زیاد قرار دارد تشکیل شده است. اساس کار این وسیله، استهلاک انرژی توسط عبور دادن تحت فشار از درون سوراخهای تعبیه شده در پیستون میباشد. ساختمان این وسیله در شکل (۵-۹) نشان داده شده است [Constantunou, 1993].
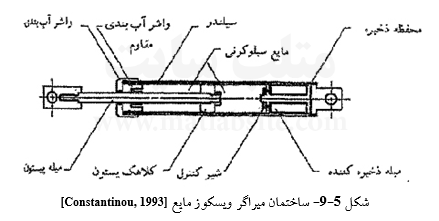
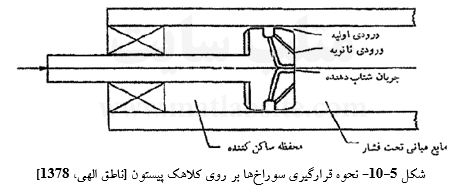
این سیستم شامل یک پیستون از جنس فولاد ضد زنگ به همراه یک کلاهک برنزی سوراخدار میباشد. این سیلندر از روغن سیلیکونی انباشه شده است. نحوه قرارگیری این سوراخها بر روی کلاهک پیستون در شکل (۵-۱۰) نشان داده شده است.
پ) سیستمهای جاری شونده:
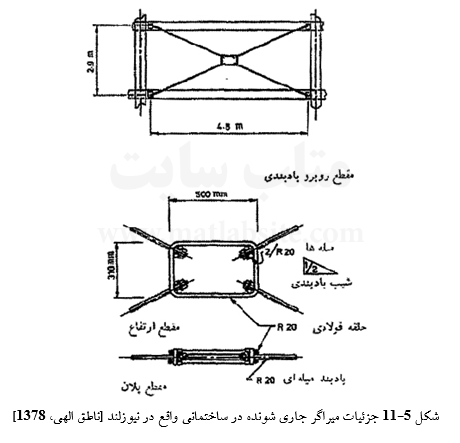
از خاصیت جاری شدن فلزات در روشهای مختلفی جهت افزایش کارآیی سازه در مقابل زلزله استفاده شده است. از جمله میتوان استفاده از سیستم بادبندهای خارج از مرکز را اشاره نمود که در بسیاری از مقالات در مورد شیوه کار آنها و چگونگی استفاده از به وجود آمدن مفاصل پلاستیک در تیر جهت استهلاک انرژی صحبت شده است. در حقیقت با استفاده از بادبند، تخریب را بر نقطهای مشخص از سازه متمرکز کرده و موجب بروز خرابی موضعی میگردد. اما بخشهای دیگری نیز وجود دارد که بر پایه جاری شدن فلزات نرم میباشد به این صورت که با افزودن قطعهای به سیستم از جنس فلز و انتقال نیروی حساب شده به آن موجب جاری شدن ان در هنگام وقوع بارگذاری و در نتیجه باعث مستهلک نمودن مقدار زیادی از انرژی ورودی به سازه میگردد. بر پایه این روش، عمل تخریب، دیگر بر روی اسکلت سازه رخ نمیدهد بلکه بر روی قطعهای از پیش تعیین شده رخ میدهد که بعد از بارگذاری نیز قابل تعویض میباشد [ناطق الهی، ۱۳۷۸]. تحقیقات بر روی قابهای مجهز به بادبندهای ساخته شده از جنس آهن مدور که به شیوه مخصوصی در قاب قرار میگیرند، انجام شده است. شکل (۵-۱۱) جزئیات این نوع بادبند را در ساختمان نمایش میدهد [ناطق الهی، ۱۳۷۸].
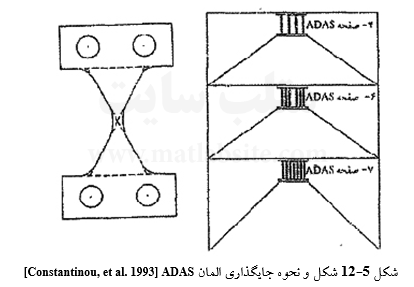
وسیله دیگری که میرایی و سختی افزدونی به سیستم اعمال مینماید و منحصراً ADAS نامیده میشود توسط پژوهشگران مورد مطالعه قرار گرفته است [Whittaker, 1982]. این وسیله شامل صفحههایی از جنس آهن به شکل تقریبی X میباشد که به صورت موازی به تعداد مورد نیاز در کنار هم قرار میگیرد و نهایتاً میراگر در انتهای بادبند (K معکوس)، در سیستم نصب میگردد. شکل و نحوه جایگذاری این المان در شکل (۵-۱۲) نشان داده شده است [Constantinou, et al. 1993].
مزایای این سیستم را میتوان به صورت زیر آورد:
– مستهلک شدن انرژی در محلی مشخص از سازه متمرکز میگردد که قبلاً برای این منظور طراحی شده است
– میزان انرژی ارسالی به سایر المانهای سازه به نحو مطلوبی کاهش پیدا میکند
– جاری شدن المان ADAS تاثیری بر ظرفیت باربری ثقلی سازه نمیگذارد، زیرا این سیستم خود جزئی از سیستم باربر جانبی میباشد
– المانهای ADAS بعد از وقوع هر زلزله در صورت لزوم به سادگی، قابل تعویض میباشند [Xia, et al. 1992]
۵-۲-۲- سیستمهای تغییر دهنده فرکانس سازه
اما سیستمهای تغییر دهنده فرکانس را میتوان به چند دسته تقسیم کرد:
الف) روش ایزوله گرهای پایهای
ب) روش میراگر و ستون مایع تنظیم شونده
پ) روش میراگر و جرم تنظیم شونده
الف) روش ایزوله گرهای پایهای
ایزوله کردن پایه سازهها یکی از روشهای طراحی لرزهای است که سازه را در مقابل احتمال بروز خطر نیروی زلزله توسط مکانیسم کاهش انتقال ارتعاش افقی زلزله به سازه حمایت میکند. مفهوم اصلی در ایزوله گرهای پایهای کاهش فرکانس اصلی ارتعاش سازه به منظور پایین آمدن مقدار فرکانس سازه نسبت به فرکانس ارتعاش انتقالی توسط حرکت بزرگ زلزله است [Datta, 1996].
پیشنهاد دیگر این است که در ایزوله گر پایهای از وسایل مستهلک کننده انرژی به منظور کاهش شتاب به سازه فوقانی استفاده شود. از این رو ایزوله گرهای پایهای را میتوان جزء هر دو دسته عمده کنترل گرهای غیرفعال قرار داد.
در هر صورت فرکانس اصلی ایزوله گر پایهای کمتر از هر دو فرکانس سازه و زلزله میباشد. در مود اول ایزوله گر، فقط ما شاهد تغییر شکل ایزوله گر و صلب ماندن سازه هستیم. بنابراین انرژی زیادی در حرکت زمین در فرکانس مودهای بالاتر از بین میرود.
ساختمانهای ایزوله شده پایهای، امروزه توسط انعطافپذیری برشی که بین پایه ساختمان و پی که توسط ایزولهگر تامین میگردد حمایت میشود.
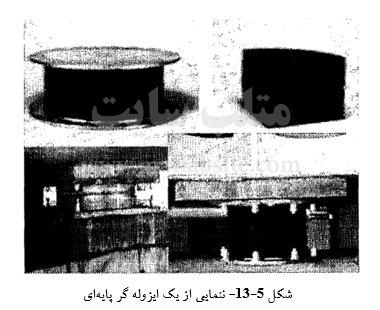
لاستیکهای برشی ورقهای مهمترین قسمت یک ایزوله گر پایهای محسوب میشوند. یک طرح کلی لاستیکهای برشی ورقهای که به صورت موازی عمل میکنند مانند یک فنر و میراگر مدل شدهاند که در شکل (۵-۱۳) میآید. بر طبق آن کاهش تغییر مکان قائم توسط یک هسته مرکزی صورت میگیرد که از ترکیب وسائل مستهلک کننده انرژی تشکیل میشود. رفتار ذاتی این سیستم مثل یک طرح میراگر هیستروتیک عمل میکند.
در دیگر انواع ایزوله گرهای پایهای انواع وسائل از جنس برشی اصطکاکی و ایزولهگرهای پایهای اصطکاکی ارتجاعی (R-FBI) و سیستم آونگ اصطکاکی به کار گرفته میشود [Datta, 1996].
در سازههایی که با سیستم ایزولهگر آونگ اصطکاکی حمایت میشوند، سازه حرکت زلزله را با دامنه کوچک حرکت آونگ پاسخ میدهد. میراگرهای اصطکاکی انرژی زلزله را جذب میکنند.
معادله حرکت سازههای با ایزولهگر پایهای در دو بخش نوشته میشود، که به هم متصل میشوند؛ قسمت اول زیر سازه است که سازه اصلی را از حرکت جرم پایه پی جدا میکند. قسمت دوم معادلات حرکت باید روی اجزاء ایزولهگر به صورت خطی یا غیر خطی نوشته شود. در نهایت معادلات ترکیبی حرکت توسط روشهای گوناگونی که موجود است حل میشوند.
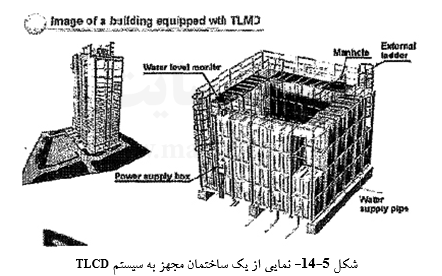
ب) میراگر و ستون مایع تنظیم شونده (TLCD)
این سیستم شامل یک لوله U شکل میباشد که یک مایع درون آن در حرکت است و در پایین این لوله در قسمت شکم لوله یک سوراخ ریز تعبیه گردیده است تا آنکه در مقابل حرکت لوله به وسیله عبور مایع از سوراخ جلوگیری به عمل آید.
در این میراگرها مایع میانی که باعث بهبود ارتعاش تحت اثر زلزله و حرکت باد میشود معمولاً از ویسکوزیته بالایی برخوردار است. عمدتاً این سیستم در قسمت فوقانی سازه نصب میشود و تا به حال تحقیقات زیادی روی آن صورت گرفته است [Samali, 1995]. رفتار TLCD بسیار حساس بوده و باید با فرکانس سازه تنظیم گردد تا باعث کاهش ارتعاش سازه شود، و تنظیم ان مانند تنظیم پارامترهای TMD است (در قسمت بعد به طور مفصل در TMDها توضیح داده میشود) و از این رو خیلی شبیه به TMD رفتار میکند (شکل ۵-۱۴).
معادله حرکت آنها به صورت عمومی به فرم زیر است:
![]()
(۴-۵)
ξ ضریب کاهش ارتفاع مایع درون لوله میباشد که از نسبت باز شدگی سوراخ بدست میآید؛ g شتاب ثقل بوده؛ ρ، L ، B و A به ترتیب چگالی، طول مایع، عرض و سطح مقطع لوله است. TLCD با حرکت سازه ترکیب میشود، چون که حرکت سازهای در طبقه nام تحت تاثیر معادله فوق میباشد. در معادله فوق میرایی غیر خطی بوده که برای حل خطی میتوان از معادله زیر استفاده کرد:
![]()
(۵-۵)
که ![]() است و σx انحراف معیار استاندارد سرعت مایع است.
است و σx انحراف معیار استاندارد سرعت مایع است.
پ) میراگر و جرم تنظیم شونده (TMD)
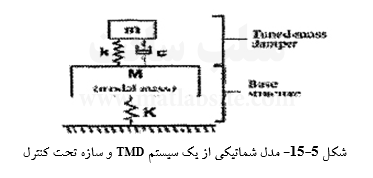
جرم تنظیم شونده و میراگر (TMD) یک روش کلاسیک مهندسی است و شامل یک جرم میباشد که توسط یک فنر و میراگر ویسکوز به سازه ضمیمیه میشود (شکل ۳-۱۵). به طور عمومی فرکانسهای طبیعی TMD در نزدیکی یکی از فرکانس طبیعی سازه تنظیم میشود که معمولاً این فرکانس، فرکانس مود اول سازه میباشد. در نتیجه ارتعاش سازه اصلی به موجب ارتعاش کردن TMD در رزونانس مستهلک میشود.
در سال ۱۹۰۹ توسط Frahm مفهوم TMD مورد توجه قرار گرفته و طی آن چندین تحقیق صورت گرفته آزمایشات و تحقیقات ویژه در امر کنترل ارتعاشات توسط انواع بار انجام پذیرفت. در طول دیگر تحقیقات تسای و همکارانش حل کلاسیک سیستم اولیه میرا شده را گسترش دادند و با استفاده از منحنیهایی که بر روی فرمولها منطبق شده بودند پارامترهای TMD را به صورت بهینه بدست آوردند [Tsai, 1993]. اما شواهد نشان میدهد که این سیستم سالیان خیلی قبل تر از Frahm در ایران به کار برده میشده است، نظیر گنبدها و سقفهای گوناگون که معمولاً یک گوی توسط یک زنجیر از سقف آویزان شده با توجه به نوع و اندازه سازه گنبد، بزرگی گوی و طول زنجیر متفاوت بوده است.
بهینه کردن پارامترهای TMD که شامل تنظیم فرکانس و بهینه کردن میرایی است توسط دنهرتنگ و رائول بدست آمد [Datta, 1996].
فرمول اصلی برای تنظیم پارامترهای جرم، فرکانس TMD و میراگر برای انواع مختلف ارتعاش، توسط تحقیقات گوناگونی بررسی شده است [Datta, 1996].
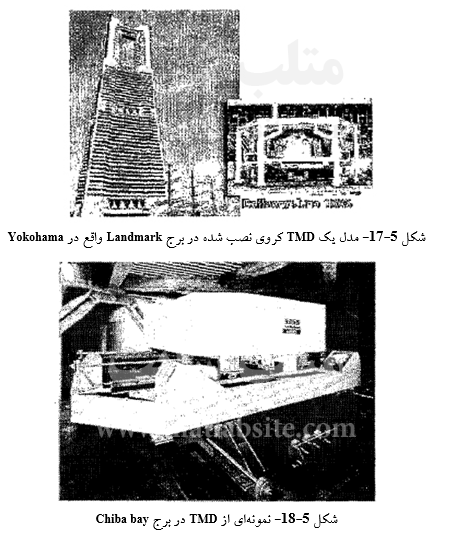
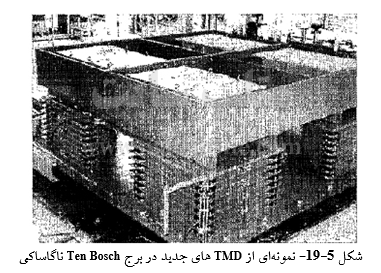
TMD به طور عمده نیاز به حل یک سیستم خطی میرا شده غیر کلاسیک با هر یک از تکنیکهای محاسبات پایدار را دارد. TMD ها در کنترل ارتعاش بعضی از ساختمانها (مثل برج city carpenter در نیویورک، برج Landmark در نیویورک، برج Tenbosch, chiba bay در ناگاساکی و …) به طور موفقیتآمیزی ظاهر شدند (شکلهای (۵-۳، ۵-۱۷، ۵-۱۸، ۵-۱۹)).
ادامه دارد ….
آنچه مطالعه کردید، بخش هایی از «فصل پنجم» کتاب «بهینه کنترل فعال سازه با رویکرد کلاسیک و هوش مصنوعی» تالیف «جواد پالیزوان (مدرس دانشگاه) و زند علی روشنی (مدرس دانشگاه)»، می باشد که در راستای معرفی و انتشار رایگان جهت استفاده مخاطبین متلب سایت در اختیار این مجموعه قرار داده شده است.
برای تهیه این کتاب می توانید به این لینک(+) مراجعه نمایید.
همچنین آموزش های زیر در فرادرس نیز مباحثی مرتبط با محتوای این کتاب را پوشش می دهند:
مجموعه: معرفی کتاب, مهندسی عمران
