سیستم های کنترل خطی
تحلیل و طراحی سیستم های کنترل خطی، از جمله مباحث پایه ای است که در رشته های مهندسی کنترل، مهندسی برق، مهندسی مکانیک، مهندسی مکاترونیک و سایر زمینه های مرتبط، مطرح می شود و یکی از مولفه های مورد نیاز برای کار یک مهندس در محیط صنعتی است.
تحلیل و طراحی سیستم های کنترل خطی، از جمله مباحث پایه ای است که در رشته های مهندسی کنترل، مهندسی برق، مهندسی مکانیک، مهندسی مکاترونیک و سایر زمینه های مرتبط، مطرح می شود و یکی از مولفه های مورد نیاز برای کار یک مهندس در محیط صنعتی است.
در درس «سیستم های کنترل خطی» (Linear Control Systems) به موضوع تحلیل سیستم های دینامیکی خطی و طراحی کنترل کننده برای این سیستم ها پرداخته می شود. روش هایی که در این درس مورد بررسی قرار می گیرند، روش های پایه ای و اساسی مهندسی کنترل هستند و پیش نیاز مهم سایر درس های رشته مهندسی کنترل محسوب می شوند.
بخش مهمی از کاربردهای صنعتی تئوری سیستم های کنترل، دقیقا ریشه در مباحث درس سیستم های کنترل خطی دارد و از این نظر، فهم دقیق و کامل این روش ها، در برقراری ارتباط با سیستم های کنترل صنعتی، بیشترین نقش را دارد.
درس «سیستم های کنترل خطی» در مقطع کارشناسی مهندسی برق و مکانیک به دانشجویان ارائه می شود و از جمله دروس مهمی است که در آزمون های ورودی به مقطع کارشناسی ارشد و دکترای تخصصی، مطرح می شوند. تسلط بر این درس، علاوه بر ضرورتی که از نظر درسی در طول دوران تحصیل دارد، نقش بسیار مهمی را در موفقیت در آزمون های ورودی تحصیلات تکمیلی بر عهده دارد.
در مجموعه فرادرس های آموزش سیستم های کنترل خطی، مباحث تئوری و رویکردهای تحلیل و طراحی سیستم های خطی به صورت کامل تشریح و بررسی شده اند. در این میان، علاوه بر مباحث آموزشی، سوالات متعددی از آزمون کارشناسی ارشد نیز حل و بررسی شده اند و از این نظر، این مجموعه آموزشی، می تواند برای افرادی که قصد آمادگی برای آزمون کارشناسی ارشد یا دکتری را دارند، مورد استفاده واقع شود.
یکی از ویژگی های منحصر به فرد این مجموعه آموزشی، بیان نکات عملی و کار با نرم افزار متلب برای حل مسائل طرح شده است. در این مجموعه آموزشی، علاوه بر بیان تئوری های مربوط به روش های مطرح شده، پیاده سازی عملی و شبیه سازی نتایج به دست آمده با استفاده از نرم افزار متلب و تولباکس (جعبه ابزار) کنترل نیز در دستور کار قرار گرفته اند و از این نظر، مجموعه ای منحصر به فرد برای علاقه مندان به کاربردهای عملی تئوری کنترل ارائه شده است.
سیستم های کنترل خطی — کلیک کنید (+)
فهرست سرفصل های مورد بحث در این مجموعه آموزشی، در ادامه آمده است:
- درس یکم: مقدمه ای بر سیستم های کنترل
- کنترل چیست؟
- مروری بر تاریخچه علم مهندسی کنترل
- مروری بر کاربردهای نظریه کنترل و سیستم
- ارائه مثال های واقعی از سیستم های کنترل
- اهدافی که در مهندسی کنترل به دنبال آن هستیم
- یک مهندس کنترل کیست؟
- درس دوم: مدل سازی سیستم ها در حوزه فرکانس
- نحوه توصیف یک سیستم دینامیکی
- مروری بر تبدیل لاپلاس
- بیان یک سیستم دینامیکی با تبدیل لاپلاس
- تابع تبدیل یا تابع انتقال (Transfer Function)
- مدل سازی سیستم های الکتریکی
- مدل سازی سیستم های مکانیکی انتقالی
- مدل سازی سیستم های مکانیکی دورانی
- مدل سازی سیستم های مبتنی بر چرخ دنده
- مدل سازی سیستم های الکترومکانیکی
- مدل سازی سیستم های دیگر
- عوامل غیر خطی و خطی سازی
- درس سوم: مدل سازی سیستم ها در حوزه زمان
- استخراج مدل زمانی از معادلات دیفرانسیل
- مدل فضای حالت یا State Space Model
- تبدیل مدل فضای حالت به تابع تبدیل
- تبدیل تابع تبدیل به مدل فضای حالت
- خطی سازی مدل های فضای حالت
- درس چهارم: بلوک ها، سیگنال ها و نمایش گرافیکی سیستم ها
- دیاگرام بلوک ها یا Block Diagrams
- مولفه های سازنده
- نمایش مدل های ریاضی با بلوک ها
- ساده سازی بلوک ها
- فیدبک
- گراف های جریان سیگنال با Signal Flow Graphs
- مولفه های سازنده
- ویژگی های اساسی
- نمایش المان های مختلف
- ساده سازی گراف های سیگنال
- قاعده میسون (Mason)
- دیاگرام بلوک ها یا Block Diagrams
- درس پنجم: بررسی پاسخ زمانی سیستم های دینامیکی (الف)
- پاسخ زمانی سیستم ها
- آشنایی با مفهوم قطب ها و صفرها
- ملاحظات اولیه در تاثیر قطب ها بر پاسخ سیستم
- ملاحظات اولیه در تاثیر صفر ها بر پاسخ سیستم
- پاسخ زمانی سیستم های مرتبه اول
- بررسی حالات مختلف سیستم های مرتبه اول
- درس ششم: بررسی پاسخ زمانی سیستم های دینامیکی (ب)
- پاسخ زمانی سیستم های مرتبه دوم
- بررسی حالات مختلف سیستم های مرتبه دوم
- تعاریف و مفاهیم مرتبط با پاسخ های زمانی
- بررسی اثر صفرها و قطب ها در پاسخ سیستم ها
- درس هفتم: پایداری سیستم های دینامیکی
- تعریف عمومی پایداری
- انواع معیارهای پایداری در سیستم های دینامیکی
- تشخیص پایداری سیستم های کنترل در حوزه فرکانس
- بررسی پایداری سیستم های درجه اول
- بررسی پایداری سیستم های درجه دوم
- معیار راوث-هورویتز (Routh-Hurwitz) برای بررسی پایداری
- معیار راوث-هورویتز برای حالات خاص
- تشخیص پایداری در مدل های فضای حالت
- درس هشتم: خطای حالت دائمی در سیستم های خطی (الف)
- خطای حالت دائمی (ماندگار) سیستم حلقه باز
- خطای حالت دائمی (ماندگار) سیستم حلقه بسته
- سیستم حلقه بسته با فیدبک واحد
- سیستم حلقه بسته با فیدبک کلی
- تعیین خطای حالت دائمی برای ورودی های خاص
- خطای حالت ماندگار برای ورودی پله (Step)
- خطای حالت ماندگار برای ورودی شیب (رمپ یا Ramp)
- خطای حالت ماندگار برای ورودی سهمی (Parabolic)
- تعریف ثوابت و مشخصه های خطا برای تیپ های مختلف سیستم ها
- درس نهم: خطای حالت دائمی در سیستم های خطی (ب)
- خطای حالت دائمی در حضور اغتشاش (Disturbance)
- تحلیل حساسیت در سیستم های کنترل
- خطای حالت دائمی در مدل های فضای حالت
- مباحث تکمیلی در محاسبات خطای حالت دائم (ماندگار)
- بهبود و کاهش خطای حالت دائم با جبران ساز ها (Compensators)
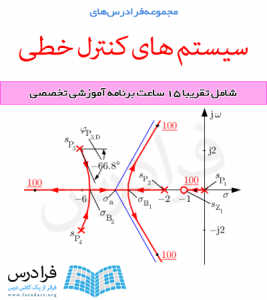
- درس دهم: مکان هندسی ریشه ها (Root Locus)
- تعریف مکان هندسی ریشه ها
- ویژگی های مکان هندسی ریشه ها
- نحوه ترسیم مکان هندسی ریشه ها
- تحلیل سیستم های کنترل خطی با مکان هندسی ریشه ها
- مقدمه ای بر طراحی سیستم های کنترل خطی با مکان هندسی ریشه ها
- تعمیم مفاهیم مکان هندسی ریشه ها
- درس یازدهم: طراحی سیستم های کنترل با مکان هندسی ریشه ها
- طراحی جبران ساز با مکان هندسی ریشه ها
- بهبود خطای حالت ماندگار
- بهبود پاسخ حالت گذرا
- رویکردهای مرسوم در طراحی کنترل کننده یا جبران ساز
- طراحی کنترل کننده
- طراحی کنترل کننده تناسبی (P)
- طراحی کنترل کننده تناسبی و انتگرال گیر (PI)
- طراحی کنترل کننده تناسبی و مشتق گیر (PD)
- طراحی کنترل کننده تناسبی، انتگرال گیر و مشتق گیر (PID)
- روش های مبتنی بر افزودن قطب یا صفر
- نکاتی درباره تحقق فیزیکی و عملی جبران سازها
- طراحی جبران ساز با مکان هندسی ریشه ها
- درس دوازدهم: پاسخ فرکانسی یا Frequency Response (الف)
- تعریف پاسخ فرکانسی
- اهمیت و کاربرد پاسخ فرکانسی در تحلیل سیستم های کنترل
- نمودار بود (Bode Plot)
- تفسیر نمودار بود یک سیستم دینامیکی
- تحلیل پایداری با نمودارهای بود
- ویژگی های حوزه فرکانس
- حد بهره (Gain Margin)
- حد فاز (Phase Margin)
- نمودار نیکولز یا Nichols Chart
- درس سیزدهم: پاسخ فرکانسی یا Frequency Response (ب)
- معیار پایداری نایکوئیست (Nyquist)
- نمودار نایکوئیست
- تحلیل پایداری با نمودار نایکوئیست
- ویژگی های حوزه فرکانس
- حد بهره (Gain Margin)
- حد فاز (Phase Margin)
- درس چهاردهم: پاسخ فرکانسی یا Frequency Response (پ)
- بررسی ارتباط میان پاسخ فرکانسی و پاسخ حالت گذرا
- بررسی ارتباط میان پاسخ فرکانسی حلقه باز و حلقه بسته
- محاسبات خطای ماندگار با استفاده از پاسخ فرکانسی
- اثر تاخیر عملکرد سیستم های کنترل
- بررسی تاخیر در پاسخ های فرکانسی
- مقدمه ای بر مدل سازی در حوزه فرکانس
- درس پانزدهم: طراحی کنترل کننده در حوزه فرکانس
- بهبود پاسخ گذار از طریق تغییر بهره
- رویکردهای طراحی کنترل کننده در حوزه فرکانس
- جبران ساز پس فاز یا Lag
- جبران ساز پیش فاز یا Lead
- جبران ساز ترکیبی پیش فاز و پس فاز (Lead-Lag)
- مباحث تکمیلی در خصوص طراحی حوزه فرکانس
- درس شانزدهم: مقدمه ای بر روش های فضای حالت
- مدل های فضای حالت
- طرحی کنترل کننده در فضای حالت با استفاده از فیدبک حالت (State Feedback)
- مفهوم کنترل پذیری (Controllability)
- تخمین حالت سیستم های دینامیکی با استفاده از رویت گر (Observer)
- مفهوم رویت پذیری (Observability)
- آنچه در ادامه مسیر مهندسی کنترل خواهد آمد
مجموعه: اخبار و تازه ها
